FANUC A20B-2001-0821
شماره بخش:A20B-2001-0821
تولید کننده:شرکت FANUC (ژاپون)
نوع محصول:هیئت کنترل تقویت کننده سرو (SVM PCB)
مجموعه تخته:A20B-2001
خانواده درایو:ماژول تقویت کننده سرو سری آلفا FANUC (SVM)
کاربرد:سیستم های راننده CNC و ربات FANUC
مرور کلی
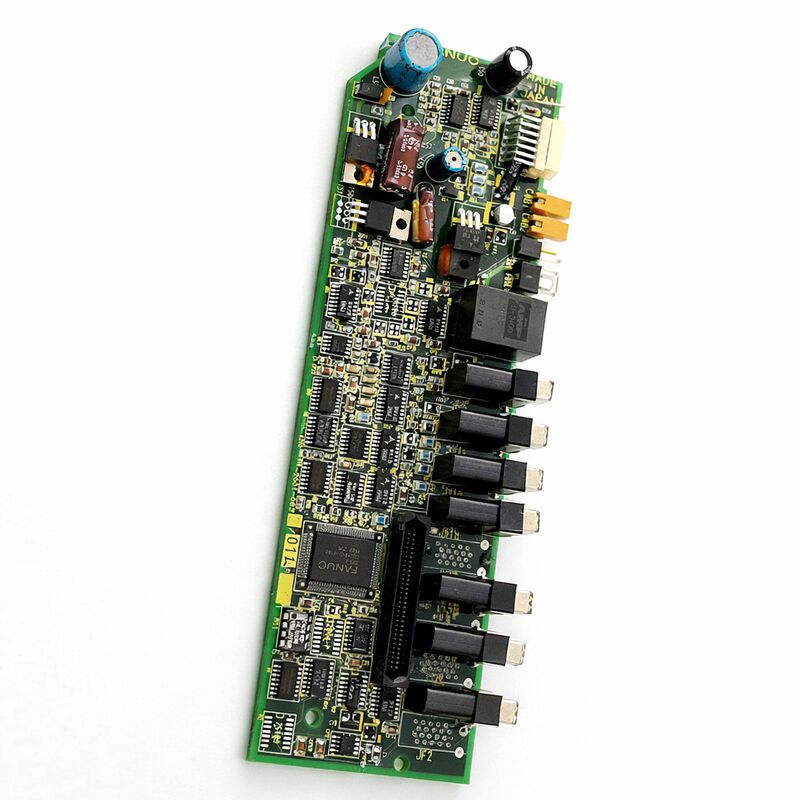
A20B-2001-0821 یک برد کنترل تقویت کننده سرو برای ماژول تقویت کننده سرو سری الفا (SVM) FANUC است.
در معماری مدولار درایو آلفا FANUC،SVM واحد تقویت کننده ای است که به طور مستقیم یک سرو موتور را تقویت می کند و ولتاژ اتوبوس DC ارائه شده توسط PSM را به AC سه فاز فرکانس متغیر که موتور را هدایت می کند تبدیل می کند..
A20B-2001-0821 هیئت مدیره در SVM است: PCB که حاوی الکترونیک پردازش برای حلقه جریان servo drive، حلقه سرعت، رابط بازخورد کدگر،و ارتباطات CNC.
درایو های سری آلفا در طیف گسترده ای از ماشین آلات و روبات های صنعتی کنترل شده توسط FANUC استفاده شده است.
در یک مرکز ماشینکاری CNC، هر موتور محوری دارای SVM خاص خود است. در یک ربات صنعتی شش محوری، هر موتور مشترک دارای SVM خاص خود است یا یک واحد SVM را با همسایه خود به اشتراک می گذارد.
هر یک از این SVM ها دارای یک صفحه کنترل هستند. هنگامی که یک صفحه کنترل servo drive شکست می خورد، آن محور یا مفصل متوقف می شود و با صفحه جایگزینی مناسب، دوباره شروع می شود.
سری A20B-2001 شامل تخته های کنترل برای چندین پیکربندی Alpha SVM است که دارای نرخ های مختلف جریان درایو و انواع رابط است.
نوع -0821 مدل SVM خاص خود را در این خانواده مورد استفاده قرار می دهد.
این برد در ژاپن ساخته شده و برای نیازهای کار مداوم کاربردهای servo drive صنعتی طراحی شده است.
مشخصات کلیدی
| پارامتر |
ارزش |
| شماره بخش |
A20B-2001-0821 |
| تولید کننده |
شرکت FANUC |
| نوع محصول |
هیئت کنترل تقویت کننده سرو |
| مجموعه تخته ها |
A20B-2001 |
| خانواده راننده |
FANUC سری الفا |
| درخواست |
FANUC CNC و کنترل ربات servo drive |
| منشاء |
ژاپن |
| دمای کار |
0 55°C (همانطور که در واحد SVM نصب شده است) |
| دمای ذخیره سازی |
-20 ️ 55°C |
| رطوبت |
75٪ RH حداکثر (غیر فشرده سازی) |
| شرایط موجود |
جدید (فاضل) / بازسازی شده / تعمیر شده |
هیئت کنترل SVM 3 حلقه در یک
هیئت کنترل سرو درایو هر سه سطح کنترل بازخورد سرو را همزمان اجرا می کند.درک اینکه چگونه این حلقه ها با هم کار می کنند، هر دو توضیح می دهد که چه چیزی باعث می شود یک درایو سرو که به خوبی کار می کند به طور دقیق کار کند و چه چیزی در هنگام تخریب صفحه کنترل شکست می خورد..
حلقه ی فعلی پایه ی آن است.
جریان فازی موتور را از سنسورهای فعلی SVM می خواند، این را با دستورات فعلی از کنترل کننده سرعت مقایسه می کند،و تنظیم سیگنال های دروازه IGBT برای آوردن جریان واقعی به سطح دستوراين حلقه با سرعت ده ها کيلو هرتز اجرا ميشه
یک مدار اندازه گیری جریان تخریب شده بر روی تخته، خطاها را به این حلقه وارد می کند و باعث تحریف جریان می شود که به عنوان سر و صدای موتور، لرزش و گرما ظاهر می شود.
حلقه سرعت بالای حلقه جریان قرار دارد.
آن را می خواند بازخورد رمزگذاری، سرعت موتور واقعی را محاسبه می کند، آن را با سرعت دستور داده شده از کنترل کننده موقعیت مقایسه می کند و دستورات فعلی را تولید می کند.
این حلقه هر چند صد مایکرو ثانیه به روز می شه.
یک مدار رابط کدگذاری تخریب شده باعث ایجاد سر و صدا در بازخورد سرعت می شود و باعث عدم ثبات سرعت می شود.
حلقه موقعیت در بالا قرار دارد. هدف موقعیت را از مداخله کننده CNC دریافت می کند و آنها را با موقعیت واقعی رمزگذاری کننده مقایسه می کند.
خطای موقعیت، فرمان سرعت را هدایت می کند. این بسته شدن حلقه هر چرخه سرو اتفاق می افتد. معمولاً 1 میلی ثانیه.
دقت موقعیت محور ماشین در نهایت بر اساس عملکرد هر سه حلقه در کنار هم در این صفحه کنترل تعیین می شود.
Alpha SVM در برنامه های کاربردی CNC و روبات
در یک ابزار ماشین CNC، ماژول های Alpha SVM در کنار PSM در کابینت درایو نصب می شوند. هر SVM یک محور را هدایت می کند. در یک مرکز ماشینکاری 3 محور، به طور معمول سه SVM وجود دارد.یک برای Y، یکی برای Z
تخته های کنترل در این SVM ها از طریق اتوبوس سریال FANUC با CNC ارتباط برقرار می کنند، دستورات موقعیت را دریافت می کنند و موقعیت های کد را گزارش می دهند.
در یک کنترل کننده ربات صنعتی FANUC، همان معماری SVM موتورهای مفصل ربات را هدایت می کند.
به عنوان مثال، نسل کنترل کننده R-J3 از Alpha SVM برای شش محور مفصل ربات استفاده می کند.
کنترل کننده ربات با این SVM ها از طریق همان رابط سریالی به عنوان CNC ارتباط برقرار می کند.
A20B-2001-0821 برد کنترل به هر دو زمینه برنامه کاربردی خدمت می کند زیرا معماری سخت افزاری سازگار است.
این سازگاری بین برنامه ها یک مزیت عملی در نگهداری است.
یک برد کنترل از یک ربات بازنشسته می تواند به طور بالقوه به عنوان جایگزینی در یک ماشین CNC، و بالعکس، اگر شماره کامل قطعات صفحه دقیقا مطابقت داشته باشد.
شناسایی خطای هیئت کنترل
یک خطای صفحه کنترل درایو سرو، الگوی خاصی از علائم را ایجاد می کند که آن را از سایر خطاهای سیستم درایو متمایز می کند.
اشتباهات موقعیت، عدم ثبات سرعت،یا سر و صدای غیرمعمول موتور که فقط در یک محور خاص ظاهر می شود در حالی که تمام محورهای دیگر به درستی کار می کنند به صفحه کنترل SVM آن محور یا مسیر بازخورد رمزگذاری آن اشاره داردمشکلات صفحه کنترل معمولاً محور خاص و سازگار هستند.
یک درایو که از ورود به حالت آماده خود در زمان روشن شدن خود امتناع می کند و قبل از دستور دادن هر حرکتی یک آژیر VRDY (سرعت آماده) نشان می دهد، نشان دهنده قوی یک خطای هیئت کنترل است.
تابلوي خود تشخيصي در زمان روشن شدن اجرا مي شه
Intermittent position errors that worsen with temperature — the axis performs correctly when the drive is cold and degrades as it warms up — suggest a thermally sensitive component on the control board reaching the end of its service life.
سوالات عمومی
Q1: یک محور CNC یک آلارم VRDY مداوم را در زمان روشن شدن تولید می کند. ولتاژ اتوبوس DC درست است. سایر محورها طبیعی هستند. آیا این A20B-2001-0821 است؟
یک آلارم VRDY تک محوری در حالت روشن شدن، با اتوبوس DC صحیح و دیگر محورهای عادی، با یک خط خط کنترل مطابقت دارد.
خود آزمايش روشن شدن تخته شکست خورد، چراغ هاي LED SVM رو چک کنيد
تایید کنید که کابل رمزگذاری کننده و کانکتور بازخورد به درستی نصب شده اند یک کانکتور بازخورد گشاده نیز می تواند این علامت را ایجاد کند.
اگر کابل ثابت شده خوب است، تخته کنترل را جایگزین کنید.
Q2: محور در سرعت پایین به درستی کار می کند اما در سرعت های بالاتر خطای موقعیت را افزایش می دهد. سیستم مکانیکی طبیعی به نظر می رسد. آیا این می تواند صفحه کنترل باشد؟
افزایش خطای موقعیت در نرخ های تغذیه بالا با یک سیستم مکانیکی عادی به حلقه های کنترل سرو اشاره دارد.
سرعت یا حلقه جریان ممکن است به اندازه کافی سریع پاسخ ندهد - نشانه ای از اینکه مدارهای پردازش صفحه کنترل خراب شده اند.
همچنین پارامترهای سرو را بررسی کنید (فائده حلقه، تغذیه جلو) برای تأیید اینکه درست هستند.
اگر پارامترها درست باشند و مشکل همچنان ادامه داشته باشد، DSP یا مدار های رابط کنترل احتمالاً قدیمی شده اند.
سوال 3: موتور محور در حالت ایستادن لرزش و سر و صدا غیرمعمولی تولید می کند، اما دقت موقعیت در هنگام حرکت قابل قبول است.
Vibration and noise at standstill with acceptable accuracy during motion typically indicates a problem in the current loop — specifically the current measurement or gate drive section of the control board.
یک خطای کوچک یا سر و صدا در بازخورد جریان در حالت ایستادن باعث ایجاد جریان تردد می شود که به عنوان ارتعاش ظاهر می شود.
این نوع نقص اغلب با افزایش درجه حرارت و افزایش سن قطعات بدتر می شود.
سوال 4: آیا می توان یک صفحه جایگزین A20B-2001-0821 از یک برنامه رباتیک را در یک ماشین آلات CNC استفاده کرد؟
اگر شماره قطعات دقیقاً با هم مطابقت داشته باشند، سخت افزار سازگار است.
برد کنترل سرو هم در برنامه های CNC و هم در برنامه های رباتیک عملکرد مشابهی را انجام می دهد. تفاوت در نرم افزار کنترل کننده و سیستم مکانیکی است، نه در صفحه محرک.
شماره کامل قطعه را شامل پسوند -0821 را تأیید کنید. هرگز پسوند دیگری را به عنوان جایگزین استفاده نکنید، حتی اگر هیئت مدیره به نظر می رسد از نظر فیزیکی مشابه است.
سوال 5: پس از تعویض صفحه کنترل، محور در هر حرکت از موقعیت هدف خود فراتر می رود. پارامترها از پشتیبان بازیابی شدند. علت احتمالی چیست؟
افزایش موقعیت پس از تعویض تخته با پارامترهای بازسازی شده به طور معمول نشان دهنده پارامتر حلقه سرو است که به درستی بازسازی نشده است.
ارزش افزایش موقعیت، افزایش سرعت یا تعویض تغذیه ممکن است نادرست باشد.
مقایسه هر پارامتر سرو برای محور تحت تاثیر با مستندات ماشین و مقادیر پشتیبان.
همچنین تأیید کنید که تنظیمات نوع کدگذاری درست است استفاده از یک تنظیمات نادرست نوع کدگذاری باعث می شود که مقیاس بازخورد نادرست که به عنوان بیش از حد یا نوسان ظاهر می شود، ایجاد شود.

 پیام شما باید بین 20 تا 3000 کاراکتر باشد!
پیام شما باید بین 20 تا 3000 کاراکتر باشد!