FANUC A16B-3200-0610 | برد بالایی درایو سروو ۶ محوره — برای آمپلی فایر سروو A06B-6107، کنترلرهای ربات R-J3iC و R-30iA، رابط FSSB، مبدا ژاپن
مرور کلی
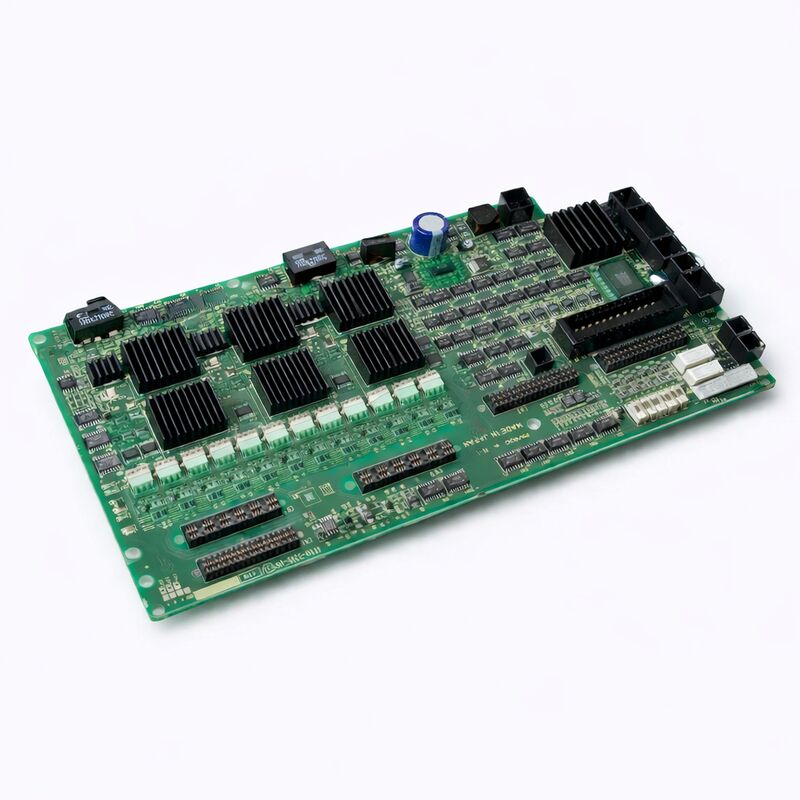
برد بالایی FANUC A16B-3200-0610 لایه هوش کنترلی آمپلی فایر یکپارچه سروو ۶ محوره FANUC سری A06B-6107 برای نسل ربات های R-J3iC و R-30iA است.
در داخل محفظه فیزیکی آمپلی فایر A06B-6107، دو نوع برد مدار به صورت مشارکتی عمل می کنند: بردهای قدرت (A20B-2101-0224 و A20B-2101-0234/0221/0230، بسته به نوع خاص سری H) که سوئیچینگ IGBT با جریان بالا و یکسوسازی باس DC را مدیریت می کنند، و برد بالایی کنترل A16B-3200-0610 که تمام هوش دیجیتال را فراهم می کند — اجرای الگوریتم سروو، ارتباطات FSSB، نظارت بر خطا و تشخیص LED.
نام "برد بالایی" هم از نظر فیزیکی و هم از نظر عملکردی دقیق است: در چیدمان فیزیکی آمپلی فایر A06B-6107، برد A16B-3200-0610 بر روی بردهای قدرت نصب شده و از جلوی واحد آمپلی فایر قابل دسترسی است.
این نصب قابل دسترسی از جلو یک ویژگی مهم از نظر سرویس دهی در طراحی درایو ربات FANUC است — برد کنترل، که جزء پرکاربردتر است، بدون نیاز به باز کردن کامل آمپلی فایر یا دستکاری سیم کشی بخش قدرت قابل دسترسی است.
درک اینکه چرا یک برد کنترل به هر شش محور سرویس می دهد، نیازمند درک فلسفه طراحی A06B-6107 است. به جای ارائه شش کارت آمپلی فایر جداگانه (یکی برای هر مفصل)، FANUC A06B-6107 را به عنوان یک واحد یکپارچه طراحی کرده است که در آن یک بخش قدرت واحد، باس DC یکسوسازی شده را در شش درایو محور به اشتراک می گذارد و یک برد کنترل واحد به طور همزمان حلقه های جریان و ارتباط FSSB تمام شش محور را مدیریت می کند.
این یکپارچگی باعث کاهش ابعاد کلی آمپلی فایر، ساده سازی سیم کشی بین کابینت درایو و کنترلر ربات و تمرکز نگهداری بر روی تعداد کمتری از اجزای قابل سرویس دهی می شود.
مشخصات کلیدی
| پارامتر |
مقدار |
| عملکرد |
برد کنترل (بالایی) درایو سروو ۶ محوره |
| آمپلی فایر سازگار |
سری A06B-6107-H001/H002/H007 |
| کنترلرهای سازگار |
R-J3iC, R-30iA |
| رابط |
فیبر نوری FSSB |
| محورهای کنترل شده |
۶ (J1 تا J6) |
| همکار برد قدرت |
A20B-2101-0224/0234/0221/0230 |
| مبدا |
ژاپن (ساخت ژاپن) |
A06B-6107 در سیستم ربات R-30iA — زمینه معماری
در کابینت کنترلر R-30iA، آمپلی فایر سروو ۶ محوره A06B-6107 یک جزء اصلی است.
بخش درایو فشرده R-30iA به گونه ای طراحی شده است که در داخل خود محفظه کنترلر ربات قرار گیرد — برخلاف نسل های قبلی ربات که واحد درایو یک رک جداگانه بزرگ بود، طراحی یکپارچه R-30iA آمپلی فایر سروو، PCB اصلی، برد ایمنی و منبع تغذیه را همگی در یک واحد کنترلر واحد قرار می دهد که می تواند نزدیک یا روی پایه ربات نصب شود.
جریان سیگنال از برنامه ربات به حرکت ربات به شرح زیر از A16B-3200-0610 عبور می کند: CPU اصلی کنترلر ربات (A16B-3200-0600 یا نوع مشابه) دستورات موقعیت مفصل و دستورات سرعت را برای هر شش محور از طریق لینک فیبر نوری FSSB ارسال می کند.
برد A16B-3200-0610 این دستورات را دریافت می کند، آنها را از پروتکل سریال FSSB رمزگشایی می کند و مراجع جریان مناسب را برای هر یک از شش حلقه کنترل جریان محور تولید می کند. به طور همزمان، بازخورد انکودر را از شش سروو موتور مفصلی از طریق کانکتورهای بازخورد آمپلی فایر دریافت می کند، حلقه های سرعت و موقعیت را برای هر محور می بندد و سیگنال های درایو گیت PWM را به ترانزیستورهای IGBT بردهای قدرت که در واقع جریان موتور را سوئیچ می کنند، خروجی می دهد.
این چرخه کنترل کامل — دریافت دستور، پردازش بازخورد، بستن حلقه، خروجی درایو گیت — هر ۲۵۰ میکروثانیه (با فرکانس PWM ۴ کیلوهرتز) برای هر شش محور به طور همزمان تکرار می شود. پردازنده برد کنترل این بار محاسباتی را بدون وقفه برای طول عمر ربات مدیریت می کند، که در کاربردهای معمول جوشکاری و جابجایی ممکن است تولید سه شیفت را برای ۱۰ تا ۲۰ سال اجرا کند.
FSSB — چرا فیبر نوری برای ارتباط سروو ربات
انتخاب FSSB فیبر نوری به جای سیم مسی برای ارتباط بین کنترلر و برد کنترل آمپلی فایر سروو، عمدی و قابل توجه است.
کابینت های ربات FANUC حاوی منابع تداخل الکترومغناطیسی قابل توجهی هستند: ترانزیستورهای IGBT آمپلی فایر سروو که با فرکانس ۴ کیلوهرتز با زمان های صعود سریع سوئیچ می کنند، پالس های تخلیه مدار احیا کننده و سوئیچینگ رله ۲۴ ولت DC برای ورودی/خروجی ماشین.
هر کابل سیگنال مسی که در نزدیکی این منابع قرار دارد، تداعی کننده تداخلی است که در وضوح زمانی میکروثانیه مورد نیاز حلقه سروو، می تواند داده ها را خراب کند.
کابل های فیبر نوری ذاتاً در برابر تداخل الکترومغناطیسی ایمن هستند — نور همان جفت شدن القایی و تداخل خازنی را که هادی های مسی را در محیط های پر نویز تحت تأثیر قرار می دهد، تجربه نمی کند.
کابل فیبر نوری FSSB بین برد اصلی کنترلر و A16B-3200-0610 داده های دیجیتال قطعی و بدون خطا را صرف نظر از آنچه در بخش قدرت آمپلی فایر سروو در فاصله چند سانتی متری اتفاق می افتد، حمل می کند.
به همین دلیل است که خطاهای اتصال FSSB ناشی از کابل های فیبر آسیب دیده، کدهای هشدار FSSB فوری و سازگار را به جای خطاهای سروو نامشخص و متناوب تولید می کنند.
تشخیص خطاهای A16B-3200-0610 در مقابل خطاهای برد قدرت
A06B-6107 هم برد کنترل A16B-3200-0610 و هم بردهای مدار قدرت را در خود جای داده است. هنگامی که یک هشدار محور ربات رخ می دهد، تمایز بین خطای برد کنترل و خطای برد قدرت نیازمند درک امضاهای خرابی هر برد است:
خطاهای برد کنترل معمولاً چندین محور را به طور همزمان تحت تأثیر قرار می دهند (زیرا یک برد همه شش محور را کنترل می کند) یا کل ارتباط FSSB را تحت تأثیر قرار می دهند و به صورت هشدارهای سروو همه محورها در هنگام راه اندازی به جای هشدارهای تک محور در حین کار ظاهر می شوند.
آرایه LED روی صفحه A16B-3200-0610 کدهای هشدار سیستم را هنگام تشخیص خطا توسط خود تشخیصی برد نشان می دهد.
خطاهای برد قدرت معمولاً به صورت هشدارهای تک محور یا جفت محور ظاهر می شوند (زیرا بخش قدرت گاهی اوقات در پیکربندی های جفتی سازماندهی می شود)، اغلب با کدهای هشدار نشان دهنده جریان بیش از حد، هشدار IPM، یا خطای باس DC در محورهای خاص.
LED یا نشانگر مخصوص برد برای محور آسیب دیده، هشدار را نشان می دهد.
وجود چندین هشدار همه محورها در هنگام راه اندازی، همراه با عدم برقراری ارتباط FSSB، به شدت به A16B-3200-0610 اشاره دارد.
یک هشدار IPM تک محور در حین حرکت خاص (به ویژه حرکتی که شامل شتاب سریع یک مفصل باردار است) به بخش قدرت اشاره دارد.
سوالات متداول
س۱: آیا برد کنترل A16B-3200-0610 را می توان بدون تعویض بردهای قدرت تعویض کرد؟
بله. A16B-3200-0610 یک برد فیزیکی مجزا از بردهای مدار قدرت در داخل آمپلی فایر A06B-6107 است و این دو نوع را می توان به طور مستقل تعویض کرد. در عمل، هنگامی که یک برد کنترل خراب می شود، بردهای قدرت معمولاً بازرسی می شوند اما به طور خودکار تعویض نمی شوند.
برعکس، هنگامی که یک برد قدرت خراب می شود (مثلاً خرابی ماژول IPM)، برد کنترل A16B-3200-0610 معمولاً حفظ می شود مگر اینکه خرابی قدرت برد کنترل را از طریق رویداد ولتاژ آسیب رسانده باشد.
دسترسی به برد کنترل در A06B-6107 مطابق با رویه جداسازی سازنده که در دفترچه راهنمای نگهداری R-30iA شرح داده شده است، انجام می شود.
س۲: پس از تعویض A16B-3200-0610، آیا برنامه های ربات و داده های کالیبراسیون نیاز به بارگذاری مجدد دارند؟
برد کنترل A16B-3200-0610 برنامه های ربات، داده های تسلط (mastering) یا داده های پیکربندی را ذخیره نمی کند — اینها در برد اصلی کنترلر ربات (به طور خاص در ماژول های SRAM و FROM) نگهداری می شوند.
تعویض برد کنترل آمپلی فایر سروو هیچ تأثیری بر داده های ذخیره شده در کنترلر ندارد.
با این حال، هنگامی که ربات پس از تعویض آمپلی فایر روشن می شود، تسلط ربات (موقعیت های مرجع انکودر مطلق برای هر مفصل) باید تأیید شود — در حالی که خود داده ها از بین نمی روند، هرگونه اختلال در اتصال باتری انکودر مطلق در حین سرویس آمپلی فایر می تواند بر داده های تسلط تأثیر بگذارد.
دقت ربات را با یک برنامه آزمایشی قبل از بازگشت به تولید تأیید کنید.
س۳: A06B-6107 هشدار "SRVO-047 خطای سرعت موتور سروو" را در چندین محور به طور همزمان تولید می کند. آیا این تأیید می کند که A16B-3200-0610 خراب شده است؟
SRVO-047 در چندین محور به طور همزمان با خطای ارتباط FSSB سازگار است — برد اصلی کنترلر نمی تواند تبادل داده دستور سرعت را با برد کنترل آمپلی فایر سروو همگام کند.
این هشدار به اتصال FSSB (کابل فیبر نوری، کانکتورها)، مدار گیرنده FSSB A16B-3200-0610 یا مدار فرستنده FSSB برد اصلی کنترلر اشاره دارد.
قبل از تعویض A16B-3200-0610، کانکتورهای کابل فیبر نوری FSSB را بازرسی و تمیز کنید و تأیید کنید که کابل در شعاعی کوچکتر از حداقل شعاع خمش مشخص شده خم نشده است.
کابل فیبر آسیب دیده رایج تر از برد خراب است و هزینه تعویض آن بسیار کمتر است.
س۴: عمر سرویس مورد انتظار A16B-3200-0610 در یک ربات جوشکاری تولیدی چقدر است؟
پاسخ واحدی وجود ندارد — عمر سرویس به شدت به محیط عملیاتی (دما محیط، سطح آلودگی، قرار گرفتن در معرض لرزش)، کیفیت خنک کننده کابینت (خنک کننده ناکافی شتاب دهنده ترین عامل پیری قطعات الکترونیکی است) و اینکه آیا رویدادهای ولتاژی (افزایش ولتاژ، حوادث تخلیه باس آمپلی فایر) رخ داده است، بستگی دارد. در محیط های تمیز و با دمای کنترل شده با خنک کننده کابینت کافی و بدون رویدادهای ولتاژ، بردهای A16B-3200-0610 به طور معمول ۱۵ تا ۲۰ سال بدون خرابی کار می کنند.
در محیط های گرم و آلوده با کیفیت توان متغیر، خرابی در ۷ تا ۱۰ سال غیر معمول نیست.
نگهداری پیشگیرانه شامل تمیز کردن کابینت، بازرسی فن خنک کننده و تعویض خازن در علامت ۱۰ سال، عمر قطعات را به طور قابل توجهی افزایش می دهد.
س۵: چگونه A16B-3200-0610 به درستی تهیه می شود تا از سازگاری با نوع خاص A06B-6107 اطمینان حاصل شود؟
آمپلی فایر سروو A06B-6107 در چندین نوع سری H (H001، H002، H007 و غیره) عرضه می شود که هر کدام برای مدل های مختلف ربات با اندازه ها و رتبه های موتور متفاوت پیکربندی شده اند.
برد کنترل A16B-3200-0610 برد کنترل مشترک در بین این انواع است، با این تفاوت که تنوع بین انواع توسط مشخصات متفاوت برد مدار قدرت حمل می شود.
شماره قطعه A16B-3200-0610 برای سفارش برد کنترل صحیح کافی است — هیچ مشخصه اضافی نوع سری H برای خود برد کنترل لازم نیست.
شماره قطعه را با برچسب روی برد نصب شده قبل از سفارش تأیید کنید.

 پیام شما باید بین 20 تا 3000 کاراکتر باشد!
پیام شما باید بین 20 تا 3000 کاراکتر باشد!