سانیو دنکی 103H7126-0740 | موتور پله ای هیبریدی دو فاز SANMOTION F2 — 1.27 نیوتن متر، 1.8 درجه، قاب 56 میلی متر، تک قطبی 3 آمپر، 24 ولت، سیم سرب
نمای کلی
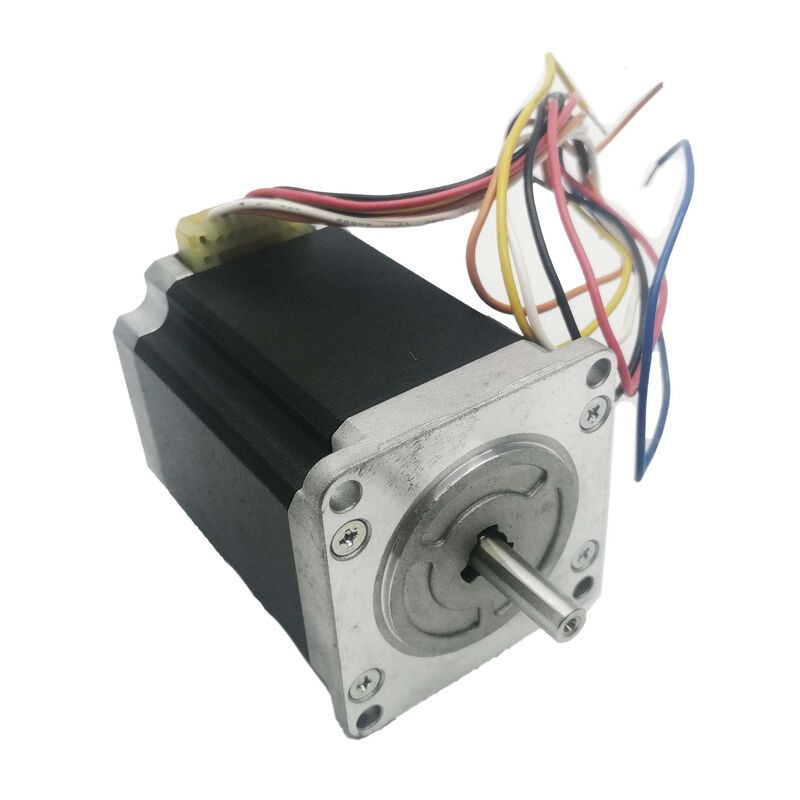
راسانیو دنکی 103H7126-0740یک موتور پله ای هیبریدی 2 فاز از سری SANMOTION F2 است که گشتاور نگهدارنده 1.27 نیوتن متر را در 3A/فاز در منبع تغذیه 24 ولت DC تولید می کند. زاویه گام 1.8 درجه 200 موقعیت مجزا در هر چرخش را ارائه می دهد - موقعیت یابی دقیق و قابل تکرار بدون رمزگذار، با چرخش حلقه باز از طریق یک درایور پله استاندارد با هزینه و پیچیدگی سیستم سروو حلقه بسته.
با فلنج مربعی 56 × 56 میلیمتر و طول 75.8 میلیمتر، این یک موتور پلهای میان برد مناسب است: در گشتاور نگهدارنده 1.27 نیوتن متری آن به اندازه کافی قابل توجه است تا بارهای معمولی مراحل موقعیتیابی دقیق، محرکهای محرک خطی، سیستمهای نمایهسازی نوار نقاله، دستگاههای شاخص نوار نقاله، و فضای کوچک CNC به اندازه 0.9 را تحمل کند. محدودیت هایی که این برنامه ها معمولا اعمال می کنند. ردپای معادل NEMA 23 یکی از استانداردترین رابط های مکانیکی در اتوماسیون صنعتی است که به معنی شکاف های 103H7126-0740 در ماشین آلات طراحی شده برای این کلاس فریم بدون سخت افزار نصب سفارشی است.
پیکربندی 6 سیم تک قطبی مشخصه الکتریکی تعیین کننده این نوع خاص است. درایورهای تک قطبی در طراحی مدار سادهتر از درایورهای پل H دوقطبی هستند - سیمپیچهای با ضربه مرکزی موتور اجازه میدهند تا جریان از هر نیمه سیمپیچ به طور متناوب بدون تعویض کامل پل مورد نیاز درایوهای دوقطبی جریان یابد. برای طراحان سیستم که یک درایو را در کنار این موتور مشخص می کنند، گزینه تک قطبی پیچیدگی و هزینه درایور را کاهش می دهد. برای سیستم هایی با زیرساخت درایو تک قطبی موجود، 103H7126-0740 مستقیماً بدون تغییر مطابقت دارد.
مشخصات کلیدی
| پارامتر |
ارزش |
| زاویه گام |
1.8 درجه (200 قدم/انقلاب) |
| نگه داشتن گشتاور |
1.27 نیوتن متر |
| جریان رتبه بندی شده |
3 A/فاز |
| ولتاژ تغذیه |
24 ولت DC |
| مقاومت در هر فاز |
0.9 Ω |
| اینرسی روتور |
0.36 × 10-4 kg·m² |
| سیم کشی |
تک قطبی، 6 سیم |
| نوع اتصال |
سیم سرب |
| اندازه قاب |
56 × 56 میلی متر |
| طول موتور |
75.8 میلی متر |
| قطر شفت |
6.35 میلی متر |
| پیکربندی شفت |
تک، دایره ای |
| جرم موتور |
0.98 کیلوگرم |
| حفاظت از ورود |
IP40 |
| دمای عملیاتی |
10- تا 50+ درجه سانتی گراد |
| رطوبت |
20-90٪ RH (غیر متراکم) |
| انطباق |
RoHS، CE، UL، TÜV |
زاویه 1.8 درجه - 200 پله، دقت حلقه باز
زاویه گام 1.8 درجه استاندارد برای موتورهای پله ای هیبریدی 2 فاز در این اندازه قاب است. هر مرحله الکتریکی روتور را دقیقاً 1.8 درجه به جلو می برد و در هر دور مکانیکی 200 پله تولید می کند. بدون رمزگذار، موتور به طور صادقانه هر فرمان پله را در محدوده تحمل مکانیکی خود اجرا می کند، و موقعیت را از مرجع استارت صرفاً با شمارش مراحل جمع می کند.
این قابلیت حلقه باز استدلال اقتصادی برای استپ موتورها بر روی موتورهای سروو در محدوده کاربردی مناسب است. یک سروو موتور به یک رمزگذار، یک سروو درایو با پردازش بازخورد حلقه بسته و سیمکشی و تنظیم پارامترهای مرتبط نیاز دارد. یک موتور پلهای به درایوی نیاز دارد که گامها را میشمرد - به طور مستقیم پیچیدگی سختافزاری و نرمافزاری کمتری برای برنامههایی که بار قابل پیشبینی است، خطر از دست دادن پله کم است، و دقت موقعیتیابی ± 1.8 درجه (یا بهتر با میکرواستپینگ) با مشخصات مطابقت دارد.
برای برنامههایی که به وضوح موقعیتیابی دقیقتری نسبت به مرحله کامل 1.8 درجه نیاز دارند، microstepping - موجود در درایورهای سازگار - به صورت الکترونیکی هر مرحله را به افزایشهای زاویهای کوچکتر تقسیم میکند. نسبتهای متداول ریز پلهای برای این کلاس موتور عبارتند از: 1/2 پله (0.9 درجه)، 1/4 پله (0.45 درجه)، 1/8 پله (0.225 درجه)، و تا 1/256 پله در بهترین تنظیمات. نسبتهای ریز پله بالاتر وضوح موقعیتی را بهبود میبخشد و ریپل گشتاور در سرعت پایین را کاهش میدهد، به قیمت کاهش گشتاور در هر میکروگام در مقایسه با عملیات تمام گام. اینرسی روتور 103H7126-0740 0.36 × 10-4 kg·m² به اندازه کافی کم است تا دستورات میکرواستپ را به آرامی در سرعت های متوسط دنبال کند.
گشتاور نگهدارنده 1.27 نیوتن متر - زمینه ایستا و دینامیک
گشتاور نگهدارنده 1.27 نیوتن متر نیرویی است که موتور برای مقاومت در برابر چرخش شفت اعمال می کند، زمانی که سیم پیچ ها برق می خورند و روتور در موقعیت پله ای ساکن است. این حداکثر گشتاوری است که موتور می تواند قبل از گام برداشتن ناخواسته روتور نگه دارد - فشاری که بار مکانیکی در هنگام استراحت موتور در برابر آن عمل می کند.
در حین کار، گشتاور موجود کمتر از گشتاور نگهدارنده است و با افزایش سرعت بیشتر کاهش می یابد. منحنی گشتاور-سرعت یک موتور پلهای هیبریدی از مقدار گشتاور نگهدارنده در سرعت صفر، از طریق کاهش متوسط در سرعتهای پایین، به سقوط تندتر در سرعتهای بالا کاهش مییابد زیرا اندوکتانس سیمپیچ زمان افزایش جریان را در هر پله محدود میکند. مقاومت 0.9 Ω در هر فاز و ویژگیهای القایی این موتور شکل آن منحنی را تعیین میکند: در منبع تغذیه 24 ولت و جریان نامی 3 آمپر، موتور با یک درایور 24 ولت گشتاور مفیدی را در محدوده سرعت عملیاتی خود ارائه میکند، اگرچه ولتاژهای تغذیه بالاتر (از طریق درایوهای جریان ثابت) قابلیت گشتاور با سرعت بالا را بیشتر میکند.
برای اندازه بار، گشتاور کاری مورد نیاز - در نظر گرفتن اصطکاک، اینرسی در طول شتاب، و هر بار استاتیکی مخالف موتور - باید کمتر از گشتاور موجود در سرعت کارکرد با یک حاشیه ایمنی کافی باشد. راهنمای عمومی سانیو دنکی برای سیستمهای پلهای توصیه میکند که با 50% یا کمتر از گشتاور موجود در سرعت کار کار کنید تا در شرایط بارگذاری متغیر، حاشیه مطمئنی در برابر گامهای از دست رفته ایجاد کنید.
پیکربندی تک قطبی 6 سیم - سادگی مدار و سازگاری با درایور
103H7126-0740 شش سیم سربی را از بدنه موتور حمل میکند: دو سیمپیچ فاز، هر یک با شیر وسط، دو سیم در هر انتهای فاز و یک شیر وسط در هر فاز میدهد. در عملکرد تک قطبی، درایور جریان را از طریق هر نیم سیم پیچ به ترتیب با انرژی دادن متناوب به نیمه های بالا و پایین هر سیم پیچ در حالی که شیر مرکزی به منبع تغذیه متصل است، تغییر می دهد. مدار پل H مورد نیاز برای عملیات سیم پیچ کامل دوقطبی مورد نیاز نیست - مدار سوئیچینگ تک قطبی آرایش ساده تری از ترانزیستورها یا ماسفت ها است.
نتیجه عملی: مدارهای درایور تک قطبی نسبت به درایورهای پل H دوقطبی هزینه کمتری دارند و طراحی آسانتری دارند. برای برنامههایی که سختافزار درایو بهصورت سفارشی طراحی شده است یا هزینهها در سطح راننده اولویت دارد، پیکربندی موتور تکقطبی BOM درایور را کاهش میدهد. برای کاربردهایی که از ماژولهای درایور استپر خارج از قفسه استفاده میکنند، بسیاری از درایورهای استاندارد صنعتی استپر از عملکرد تک قطبی و دوقطبی پشتیبانی میکنند، اغلب از طریق پیکربندی سیمکشی به جای تغییر سختافزار.
اتصال سیم سربی 6 سیم مستقیماً از بدنه موتور بدون محفظه اتصال خارج می شود. نصب به اتصال مستقیم لحیم کاری، خاتمه چین یا اتصال به یک اتصال دهنده مناسب با استاندارد سیم کشی برنامه نیاز دارد. این روش اتصال استاندارد برای این کلاس موتور در تجهیزات صنعتی است که در آن اتصال یک بار در طول مونتاژ دستگاه انجام می شود و سرنخ ها از طریق مدیریت کابل به راننده هدایت می شوند.
قاب 56 × 56 میلی متر — SANMOTION F2 در زمینه مکانیکی
فلنج مربعی 56 × 56 میلیمتر یک رابط مکانیکی استاندارد جهانی برای این دسته از موتورهای پلهای است - معادل استاندارد نصب NEMA 23 که به طور گسترده در تجهیزات آمریکای شمالی مورد استفاده قرار میگیرد و به طور گسترده در اتوماسیون صنعتی در سراسر جهان مورد استفاده قرار میگیرد. دایره پیچ، باس ثبت و قطر شفت مطابق با این استاندارد است، به این معنی که 103H7126-0740 یک جایگزین فیزیکی مستقیم برای هر موتور معادل NEMA 23 از سایر سازندگان است، مشروط بر اینکه قطر شفت (6.35 میلی متر) و طول (تقریباً 20 میلی متر) با الزامات کوپلینگ دستگاه مطابقت داشته باشد.
با طول بدنه 75.8 میلیمتر، این یک موتور با عمق کامل در کلاس فریم 56 میلیمتری است - طولانیتر و بهطور متناظر از نظر گشتاور بیشتر از مدلهای کوتاهتر با طول پشته در همان سری (که معمولاً 45 تا 55 میلیمتر طول بدنه در درجههای گشتاور پایینتر دارند). قبل از سفارش، عمق 75.8 میلیمتر باید در حفره موتور دستگاه تأیید شود، بهویژه در تعمیرات که ممکن است موتور اصلی یک نوع پشته کوتاهتر بوده باشد.
رتبه حفاظتی IP40 - ضد لمس و محافظت شده در برابر اجسام جامد بیش از 1 میلی متر - برای محیط های تمیز تا کمی آلوده که تجهیزات موقعیت یابی دقیق در آن کار می کنند، مناسب است: کابینت ماشین های محصور، اتوماسیون آزمایشگاهی، حمل و نقل نیمه هادی ها، و تولید الکترونیک. برای کاربردهایی که در معرض گرد و غبار یا سیال قابل توجهی قرار دارند، موتور به یک محفظه محافظ اضافی در اطراف بدنه موتور نیاز دارد.
SANMOTION F2 - سری هیبریدی 2 فازی سانیو دنکی
نام SANMOTION F2 103H7126-0740 را در محدوده موتورهای پله ای هیبریدی دقیق Sanyo Denki قرار می دهد. ساختار هیبریدی - ترکیب آهنربای دائمی استپر PM با روتور دندانه دار یک موتور رلوکتانس متغیر - فناوری غالب برای موقعیت یابی حلقه باز دقیق در این کلاس گشتاور و سرعت است. طراحی هیبریدی گشتاور بیشتری در واحد حجم، دقت زاویه گام بهتر و گشتاور ثابتتری در سرتاسر موقعیتهای روتور نسبت به طرحهای موتور پلهای PM قبلی ایجاد میکند.
Sanyo Denki سری SANMOTION F2 را با گواهینامه های CE، UL، و TÜV با انطباق با RoHS تولید می کند که الزامات نظارتی تجهیزات صنعتی فروخته شده در بازارهای اروپا، آمریکای شمالی و آسیا را پوشش می دهد. گواهینامه ها هم ایمنی الکتریکی (مقاومت دی الکتریک، مقاومت عایق) و هم انطباق با دستورالعمل های محدودیت مواد قابل اجرا در ساخت موتور را تایید می کنند.
محدوده دمای کارکرد 10- تا 50+ درجه سانتیگراد وسیع تر از محدوده 0-40 درجه سانتیگراد معمولی مشخصات موتور سروو است که نشان دهنده مدیریت حرارتی ساده تر موتور پله ای است. بدون بازخورد الکترونیکی یا مدار رمزگذار در داخل بدنه موتور، 103H7126-0740 پایین ترین محدوده دمای صنعتی را بدون خطر آسیب قطعات الکترونیکی که دستگاه های بازخورد بسته را محدود می کند، تحمل می کند.
سوالات متداول
Q1: آیا می توان 103H7126-0740 را به عنوان یک موتور دوقطبی به جای تک قطبی هدایت کرد؟
بله با اصلاح سیم کشی موتور تک قطبی 6 سیم را می توان با سیم کشی سری دوقطبی یا دوقطبی موازی با استفاده از جفت سیم مناسب و باز گذاشتن سیم های شیر مرکزی یا باز (سری) یا وصل کردن طبق طرح سیم کشی موازی دوقطبی، سیم کشی کرد. سیم کشی سری دوقطبی از هر دو نیمه هر سیم پیچ به صورت سری استفاده می کند که گشتاور را در سرعت های پایین افزایش می دهد اما عملکرد سرعت بالا را کاهش می دهد. سیم کشی موازی دوقطبی مقاومت موثر و اندوکتانس را در هر فاز به نصف کاهش می دهد و گشتاور با سرعت بالا را به قیمت نیاز به راننده ای که قادر به مدیریت جریان دو برابر شده است بهبود می بخشد. جریان نامی موتور 3A/فاز برای پیکربندی تک قطبی اعمال می شود. سیم کشی دوقطبی جریان موثر و ولتاژ مورد نیاز را تغییر می دهد و باید بر اساس مشخصات درایور دوباره محاسبه شود.
Q2: چه جریان و ولتاژ درایوری باید با 103H7126-0740 استفاده شود؟
جریان نامی 3A/فاز با مقاومت فاز 0.9Ω است. درایور چاپر با جریان ثابت که روی 3A/phase تنظیم شده است، پیکربندی استاندارد است. ولتاژ تغذیه باید به طور قابل توجهی بیشتر از افت مقاومتی موتور باشد (3A × 0.9Ω = 2.7 ولت در هر فاز در جریان نامی) تا به تنظیم جریان درایور اجازه دهد تا به طور موثر عمل کند - منبع تغذیه 24 ولت ولتاژ نامی است و سرعت افزایش جریان کافی را برای سرعت های عملیاتی متوسط فراهم می کند. ولتاژهای تغذیه بالاتر (تا حداکثر درایور) گشتاور با سرعت بالا را با افزایش سریعتر جریان در هر دوره پله بهبود می بخشد، اما نیاز به یک درایور جریان ثابت دارد که بدون توجه به ولتاژ تغذیه، جریان فاز را به 3A تنظیم می کند. کارکردن موتور با ولتاژ تغذیه که جریان غیرقابل تنظیمی را به بالای 3A/فاز می رساند، باعث گرم شدن بیش از حد می شود.
Q3: آیا زاویه گام 1.8 درجه به این معنی است که موتور همیشه با دقت در ±1.8 درجه قرار می گیرد؟
1.8 درجه افزایش گام دستوری است، نه دقت تضمین شده. موتورهای پله ای هیبریدی دارای دقت پله معمولی 3± تا 5±% از یک پله، غیر تجمعی هستند - برای پله 1.8 درجه، این به معنای تقریباً 0.054 ± تا 0.09 ± درجه در هر پله است، و خطا در چندین مرحله جمع نمی شود (خطای موقعیت در هر مرحله مستقل از خطای مرحله قبل است). دقت تمام گام برای اکثر کاربردهای موقعیت یابی صنعتی کافی است. برای کاربردهایی که نیاز به دقت زاویه ای بهتری دارند - هندلینگ نیمه هادی، موقعیت ابزار نوری - میکرواستپینگ و هندسه انتقال تسمه یا پیچ مکانیکی، عدم قطعیت موقعیت موثر در سطح کار را کاهش می دهد.
Q4: حداکثر سرعت عملیاتی 103H7126-0740 چقدر است؟
Sanyo Denki یک عدد حداکثر سرعت را برای سری SANMOTION F2 منتشر نمی کند زیرا سرعت قابل استفاده به گشتاور موجود در آن سرعت بستگی دارد که به نوبه خود به ولتاژ منبع تغذیه و تنظیم جریان راننده بستگی دارد. به عنوان یک مرجع کلی، موتورهای هیبریدی 2 فاز این کلاس در عملکرد تک قطبی 24 ولت معمولاً گشتاور مفیدی را تا حدود 500-1000 قدم در ثانیه (150-300 RPM) ارائه می دهند، قبل از اینکه گشتاور کمتر از بار مورد نیاز برای بسیاری از کاربردهای موقعیت یابی باشد. با یک درایور جریان ثابت ولتاژ تغذیه بالاتر، سرعت قابل استفاده به طور قابل توجهی افزایش می یابد. روش صحیح این است که منحنی گشتاور-سرعت موتور را تحت شرایط واقعی راننده ترسیم کنید و تأیید کنید که گشتاور موجود بیش از گشتاور مورد نیاز بار در حداکثر سرعت کار با حاشیه ایمنی 50 درصد است.
Q5: حالت های اصلی خرابی که باید هنگام ارزیابی یک 103H7126-0740 استفاده شده بررسی شود چیست؟
مقاومت فاز به فاز و مقاومت فاز به زمین را اندازه گیری کنید. هر جفت فاز (انتها به انتها در یک سیم پیچ کامل) باید تقریباً 1.8Ω (2 × 0.9Ω) را نشان دهد. ضربه وسط به هر انتها باید تقریباً 0.9Ω را نشان دهد. انحراف قابل توجه نشان دهنده آسیب سیم پیچ یا مدار باز است. مقاومت عایق بین هر پایانه سیم پیچی و بدنه موتور را با میگر بررسی کنید - مقادیر کمتر از 100MΩ نشان دهنده تخریب عایق است. شفت را با دست بچرخانید تا عملکرد صاف یاتاقان را بدون زبری یا بازی محوری تأیید کنید. اطمینان حاصل کنید که سیمهای سربی سالم هستند و بدون ساییدگی یا آسیب در نقطه کاهش فشار که سیمها از بدنه موتور خارج میشوند - خستگی سیم در این نقطه رایجترین خرابی مکانیکی در موتورهایی است که در حال کار بودهاند.

 پیام شما باید بین 20 تا 3000 کاراکتر باشد!
پیام شما باید بین 20 تا 3000 کاراکتر باشد!